The first walking robot that moves without GPS
Digital
Desert ants are extraordinary solitary navigators. Researchers at CNRS and Aix-Marseille University, in the Institut des Sciences du Mouvement – Étienne Jules Marey (ISM), were inspired by these ants as they designed the first walking robot that can move without GPS: AntBot. AntBot can explore its environment randomly and go home automatically, without GPS or mapping. Its secret is a celestial compass sensitive to the sky's polarized light. This work, published on February 13, 2019 in Science Robotics, opens up new strategies for navigation in autonomous vehicles and robotics.
Human eyes are insensitive to polarized light and ultraviolet radiation, but that is not the case for ants, who use it to locate themselves in space. Cataglyphis desert ants in particular can cover several hundreds of meters in direct sunlight in the desert to find food, then return in a straight line to the nest, without getting lost. They cannot use pheromones: they come out when the temperature would burn the slightest drop. Their extraordinary navigation talent relies on two pieces of information: the heading measured using a sort of "celestial compass" to orient themselves using the sky's polarized light, and the distance covered, measured by simply counting steps and incorporating the rate of movement relative to the sun measured optically by their eyes. Distance and heading are the two fundamental pieces of information that, once combined, allow them to return smoothly to the nest.
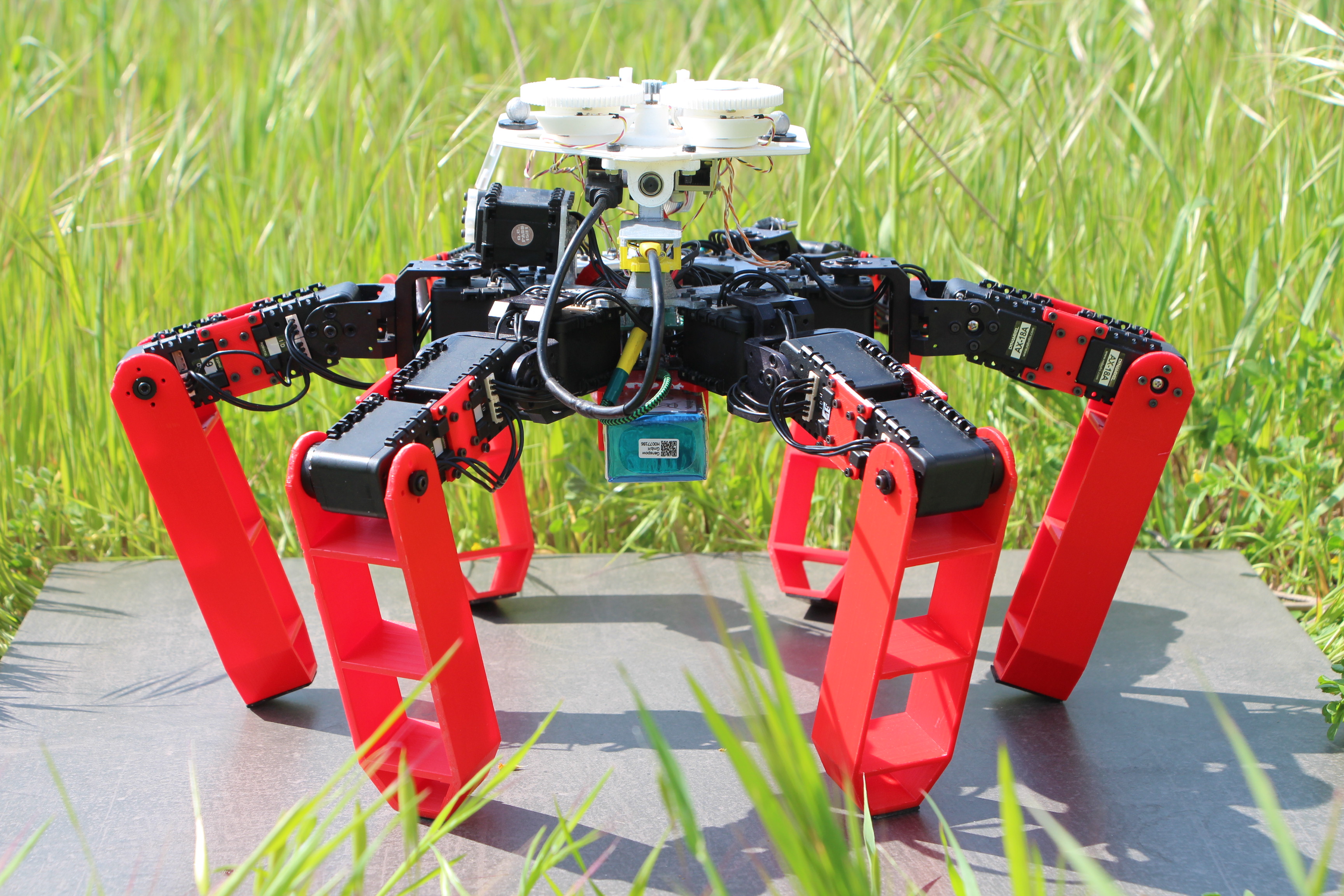
AntBot, the brand-new robot designed by CNRS and Aix-Marseille University (AMU) researchers at ISM, copies the desert ants' exceptional navigation capacities. It is equipped with an optical compass used to determine its heading by means of polarized light, and by an optical movement sensor directed to the sun to measure the distance covered. Armed with this information, AntBot has been shown to be able, like the desert ants, to explore its environment and to return on its own to its base, with precision of up to 1 cm after having covered a total distance of 14 meters. Weighing only 2.3 kg, this robot has six feet for increased mobility, allowing it to move in complex environments, precisely where deploying wheeled robots and drones can be complicated (disaster areas, rugged terrain, exploration of extraterrestrial soils, etc.).
The optical compass1 developed by the scientists is sensitive to the sky's polarized ultraviolet radiation. Using this "celestial compass", AntBot measures its heading with 0.4° precision by clear or cloudy weather. The navigation precision achieved with minimalist sensors proves that bio-inspired robotics has immense capacity for innovation. Here we have a trio of advances. A novel robot has been developed, new, innovative and unconventional optical sensors have been designed, and AntBot brings new understanding on how desert ants navigate, by testing several models that biologists have imagined to mimic this animal. Before exploring potential applications in aerial robotics or in the automobile industry, for example, progress must be made, for instance in how to operate this robot at night or over longer distances.
This work received support from the Direction Générale de l'Armement, CNRS, AMU, Provence-Alpes-Côte d'Azur region and from ANR under the Equipex/Robotex project.
Rushes are available upon request.
- 1This compass is composed of only two pixels topped by two polarized filters that turn to be equivalent to an optical sensor composed of two rows of 374 pixels. Turning the filters mechanically is an innovation that has reduced the sensor's production cost quite considerably, from over 78,000€ to only a few hundred euros, within the constraints of the biomimetics.
Bibliography
AntBot: a six-legged walking robot able to home like desert ants in outdoor environments. J. Dupeyroux, J. R. Serres et S. Viollet. Science Robotics, le 13 février 2019.
https://doi.org/10.1126/scirobotics.aau0307
Contact
Stéphane Viollet
CNRS researcher